Stanford Professors Tom Byers led a lively discussion of how to design ethical principles for autonomous vehicles with Stanford’s Chris Gerdes and Ford Motor’s Tony D’amato. Gerdes and D’amato believe that developing these rules relies on being able to translate legal and ethical principles into engineering requirements, with no need for endless philosophical discussions about The Trolly Problem (should the car hit the baby or the senior?). These engineering requirements are the basis of AI algorithms that teach ethics to self-driving cars.
Engineers have become ethicists to help clarify the choices that self-driving cars need to make; they have been making programming decisions to steer these cars through unclear, or new, and unidentified road conditions. Developing Automated Driving System (ADS) rules relies on algorithms that prioritize care for humans, respect the traffic law, and ensure that the vehicle avoids decisions that introduce unreasonable risks. Some proposed rules to avoid a collision in a self-driving car include the Safety Force Field (SFF), which uses symmetric rules for collision-free driving; another set of rules is Responsibility Sensitive Safety (RSS). However, neither the SFF nor the RSS factor in how to deal with unusual driving scenarios when following the provisions of the traffic code conflict with the goal of avoiding human harm.
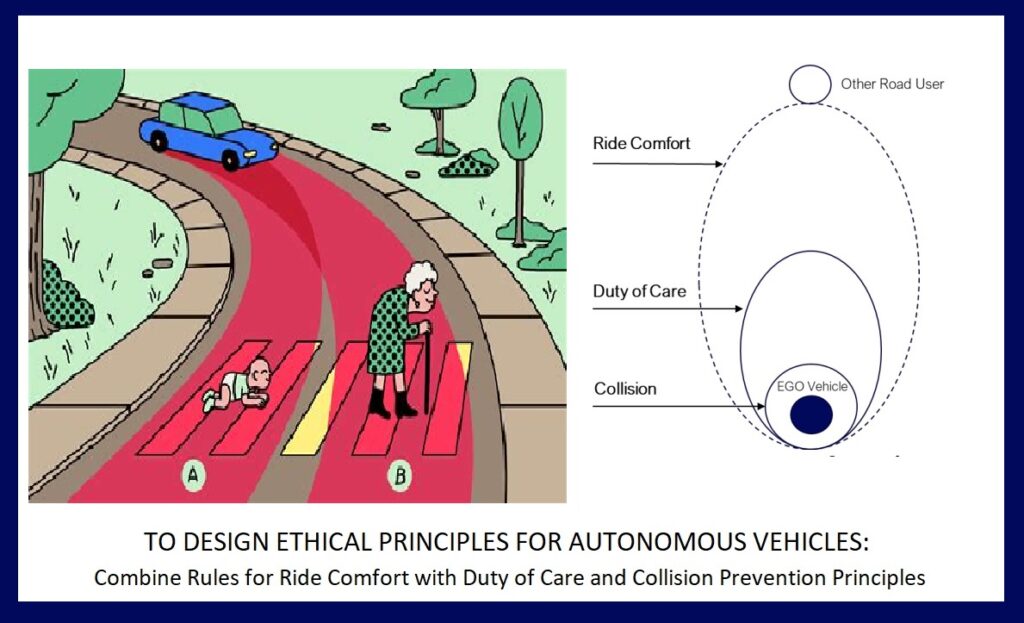
D’amato mentioned that if designers emphasize the duty of care owed to each road user, then dealing with unusual driving conditions can be handled at a high level by three hierarchical rules, (1) duty of care to all road users, (2) actively avoid harm, and (3) follow traffic code. This approach not only resolves apparent conflicts between the vehicle code and the desire to reduce harm but also resolves dilemma situations. Using these rules, the motion planner would not explicitly prioritize one group of road users over another. The motion planner would follow what the law specifies as the duty of care owed to different groups of road users and would program the vehicle to fulfill the duty owed to each road user.